TransMASK: Masked State Representation through Learned Transformation
Sagar Parekh, Preston Culbertson, Dylan P. Losey Springer Autonomous Robots Under Review
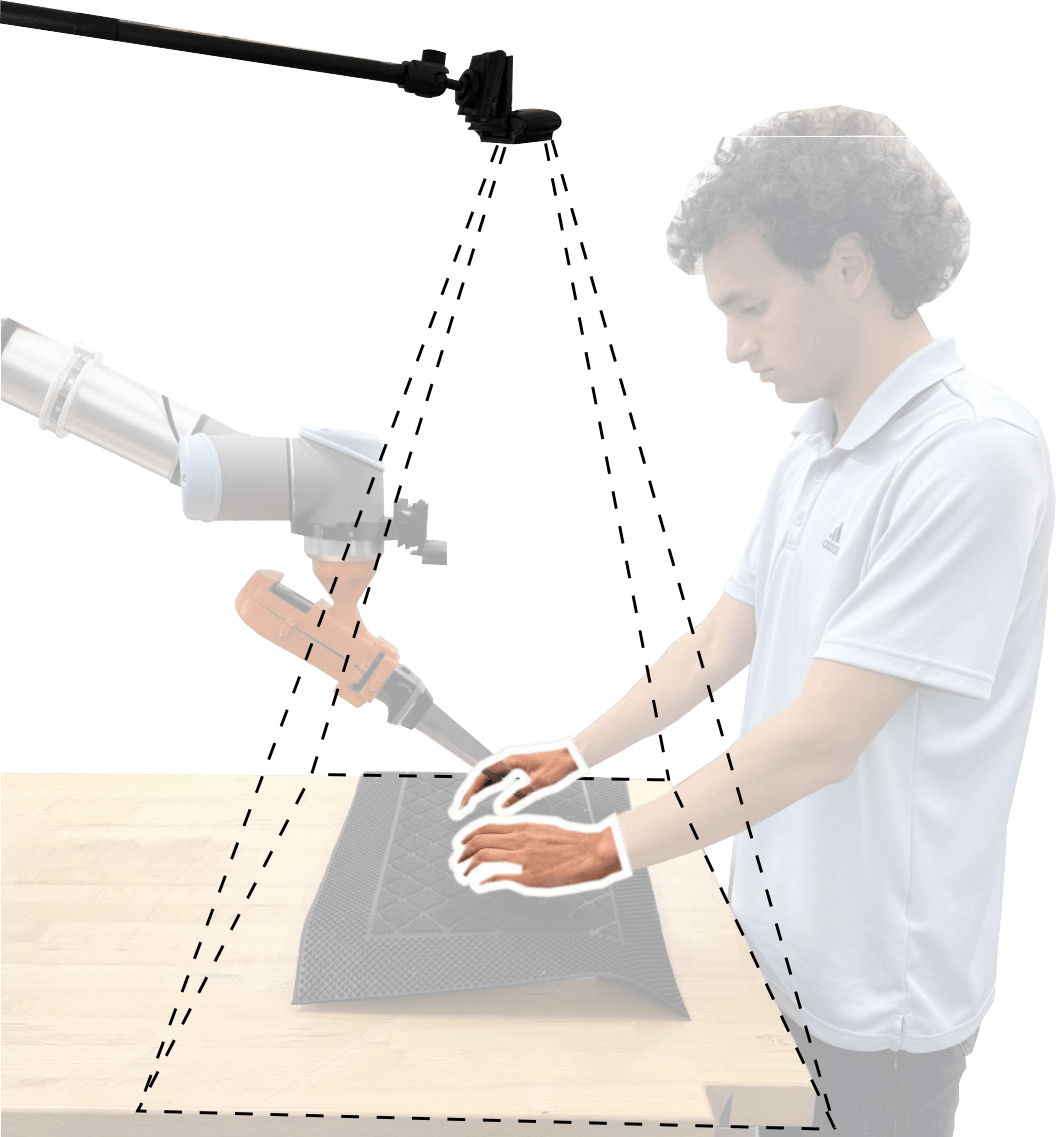
A pivot-based kirigami utensil for hand-held and robot-assisted feeding
Keone Leao, Grace Brotherson, Iain Mischel, Sagar Parekh, Dylan P. Losey IEEE International Conference on Intelligent Robots and Systems (IROS) Under Review
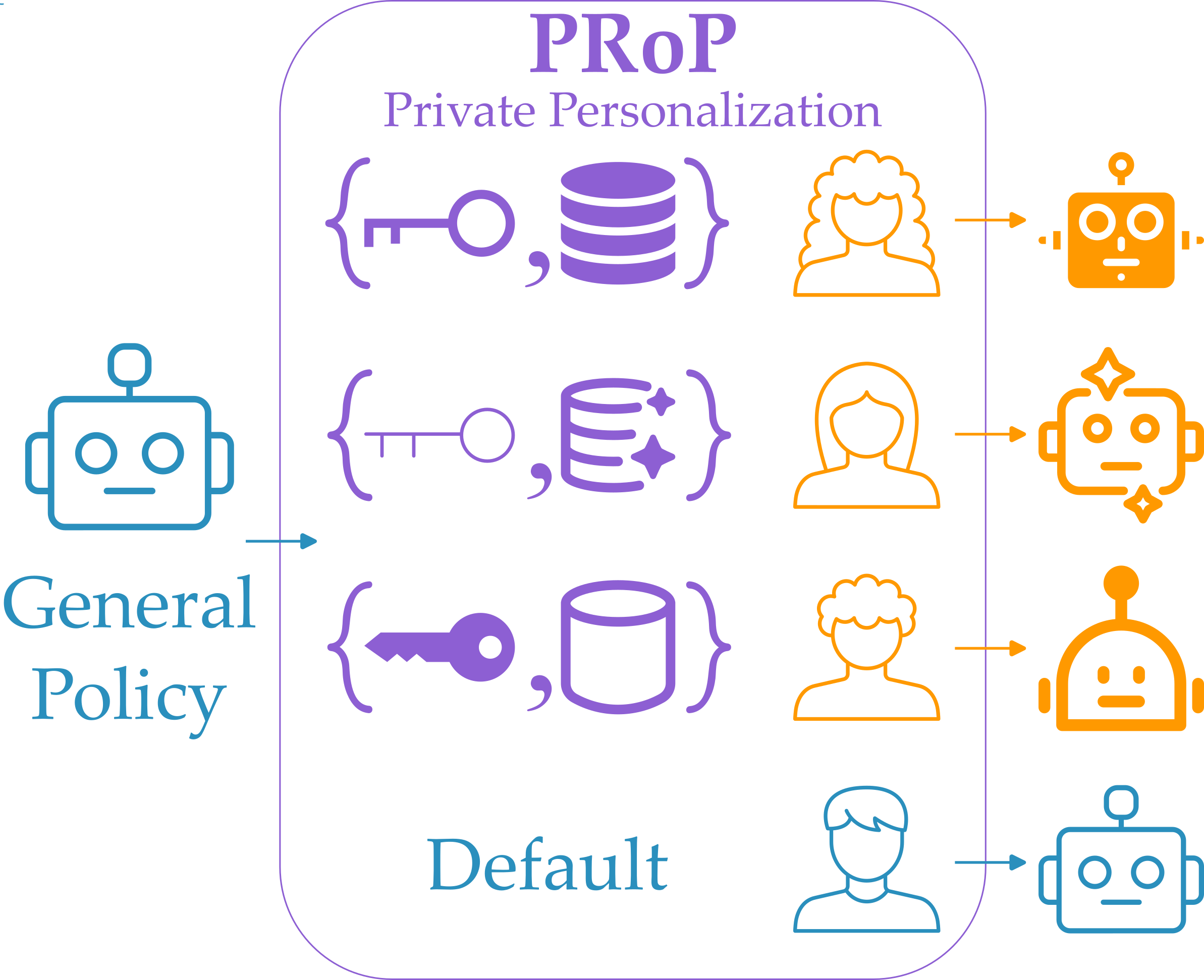
Fine-tuning robot policies while maintaining user privacy
Benjamin A. Christie, Sagar Parekh, Dylan P. Losey IEEE International Conference on Intelligent Robots and Systems (IROS) Under Review
2025
Towards balanced behavior cloning from imbalanced datasets
Sagar Parekh, Casey Grothoff, Ryan Wright, Robin White, Dylan P. Losey Springer Autonomous Robots
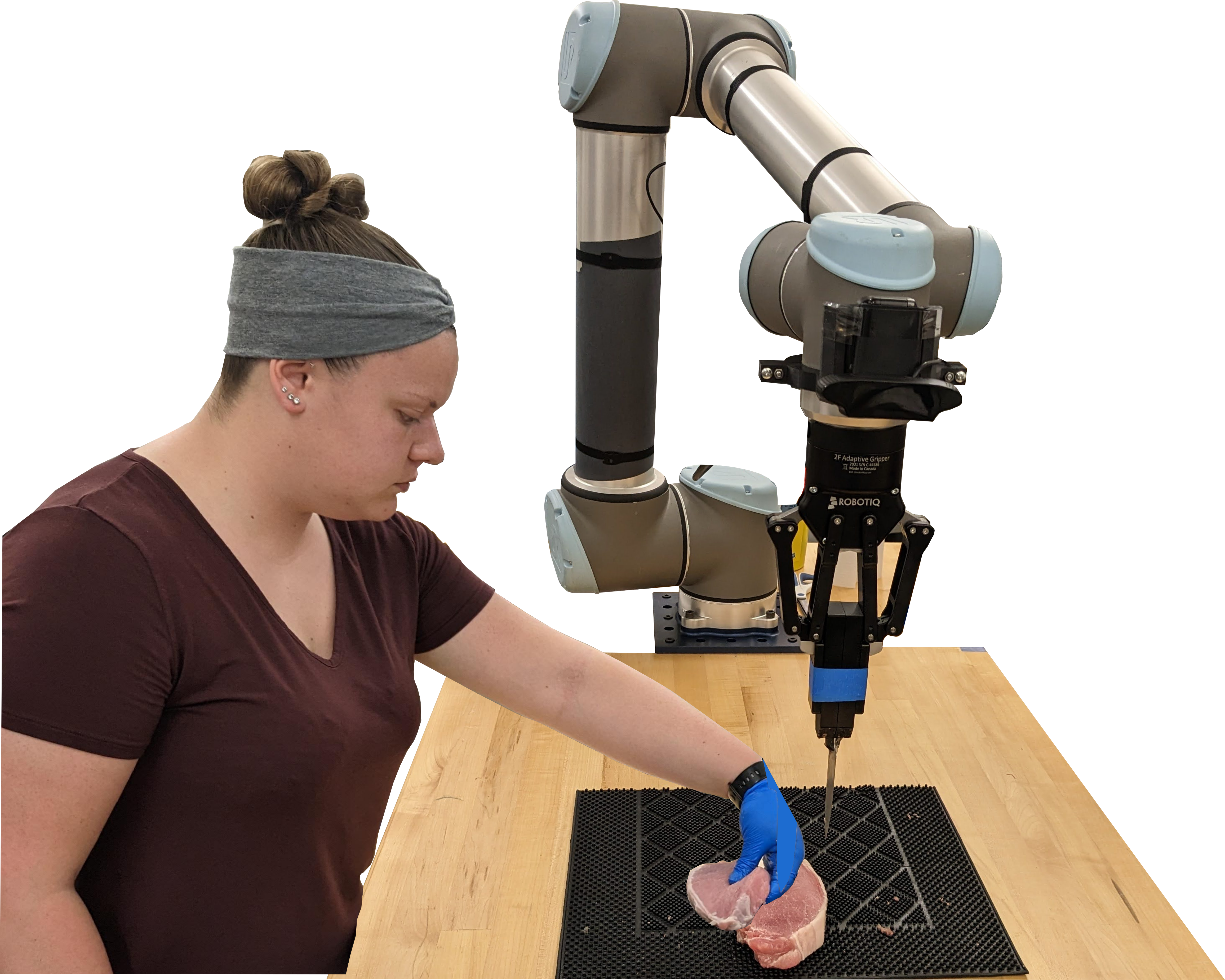
Safe and transparent robots for human-in-the-loop meat processing
Sagar Parekh, Casey Grothoff, Ryan Wright, Robin White, Dylan P. Losey Nature Scientific Reports Under Review
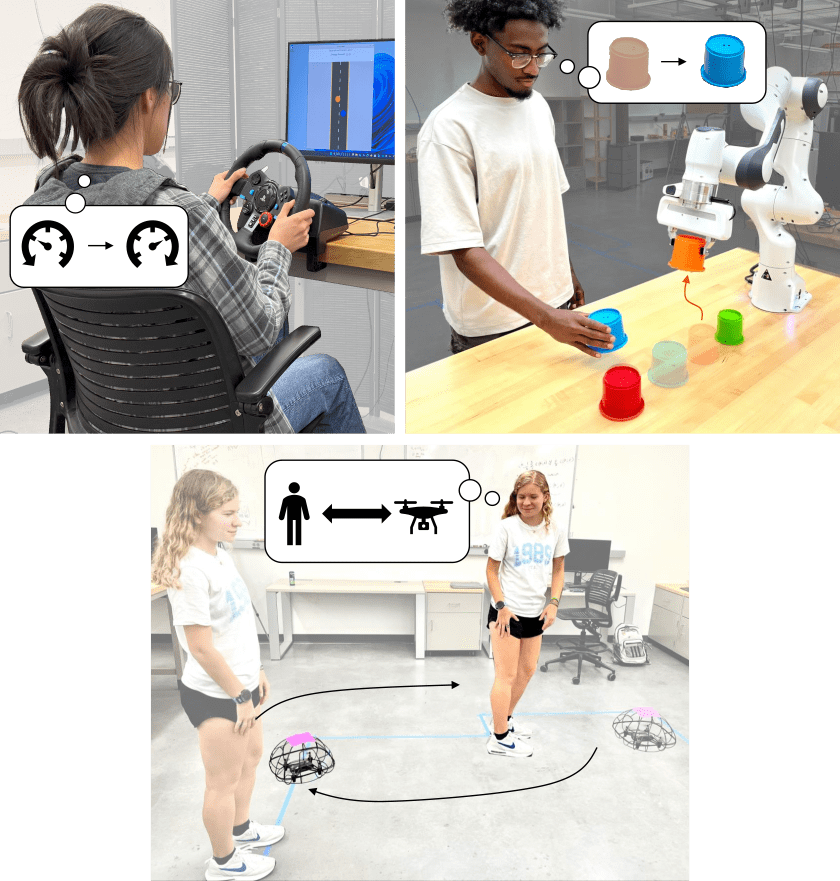
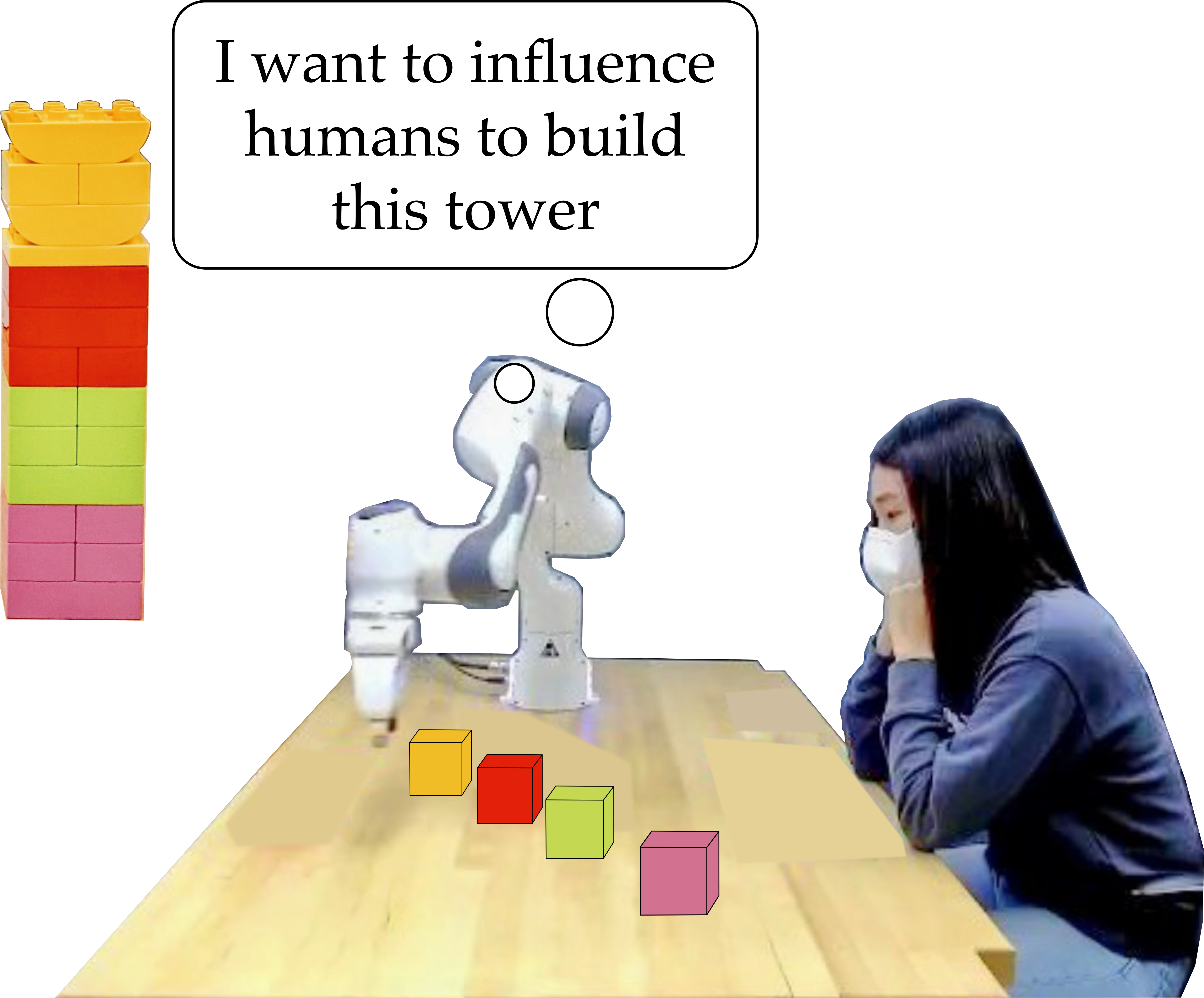
A unified framework for robots that influence humans over long-term interaction
Shahabedin Sagheb, Sagar Parekh, Ravi Pandya, Ye-Ji Mun, Katherine Driggs-Campbell, Andrea Bajcsy, Dylan P. Losey International Journal of Robotics Research Under Review
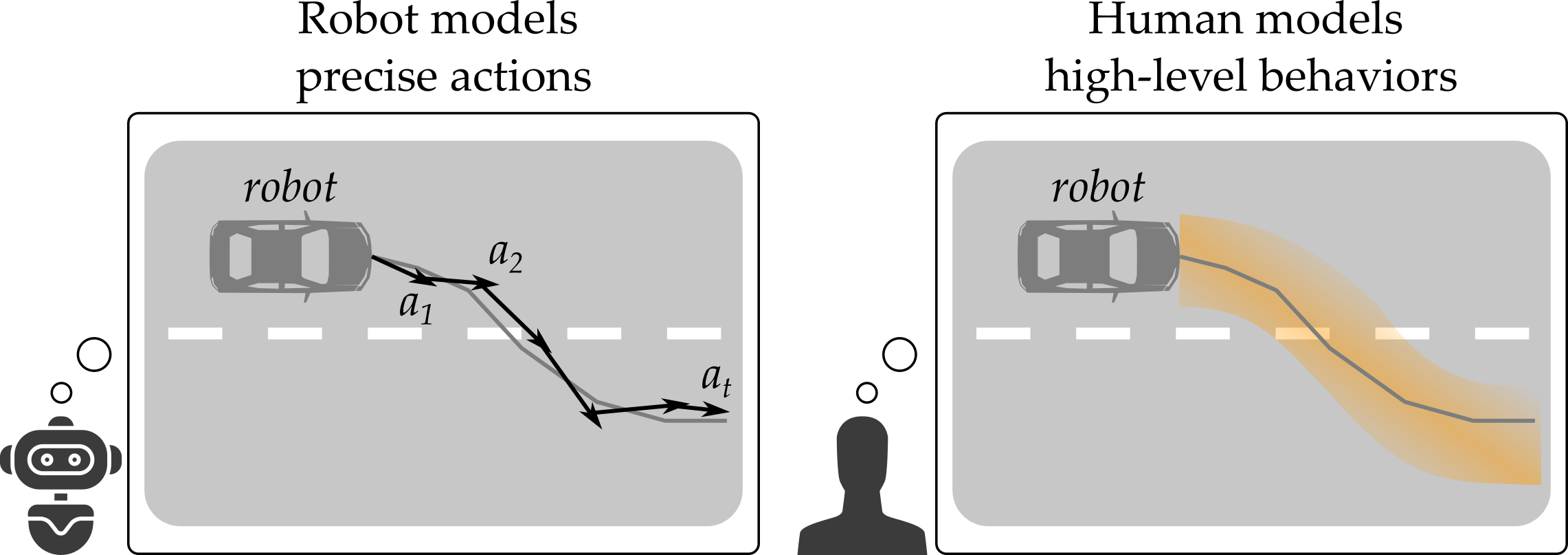
Using High-Level Patterns to Estimate How Humans Predict a Robot will Behave
Sagar Parekh, Lauren Bramblett, Nicola Bezzo, Dylan P Losey IEEE International Conference on Intelligent Robots and Systems (IROS)
2024
VIEW: Visual Imitation Learning with Waypoints
Ananth Jonnavittula, Sagar Parekh, Dylan P Losey Springer Autonomous Robots
Safely and autonomously cutting meat with a collaborative robot arm
Ryan Wright*, Sagar Parekh*, Robin White, Dylan P Losey Nature Scientific Reports
2022
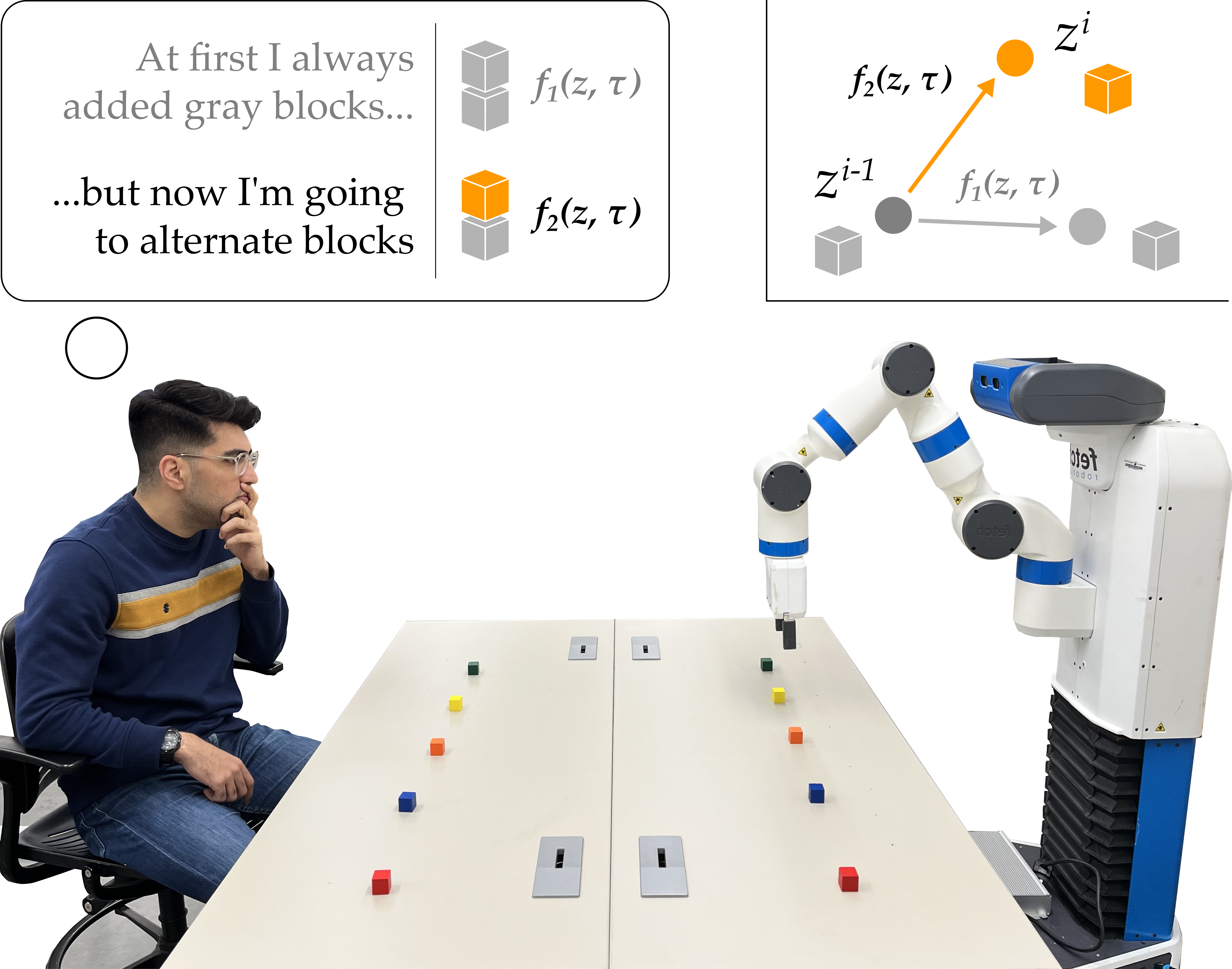
Learning Latent Representations to Co-Adapt to Humans
Sagar Parekh, Soheil Habibian, Dylan P Losey Springer Autonomous Robots
RILI: Robustly influencing latent intent
Sagar Parekh, Soheil Habibian, Dylan P Losey IEEE International Conference on Intelligent Robots and Systems (IROS)
Learning latent actions without human demonstrations
Shaunak A Mehta*, Sagar Parekh*, Dylan P Losey IEEE International Conference on Robotics and Automation (ICRA)
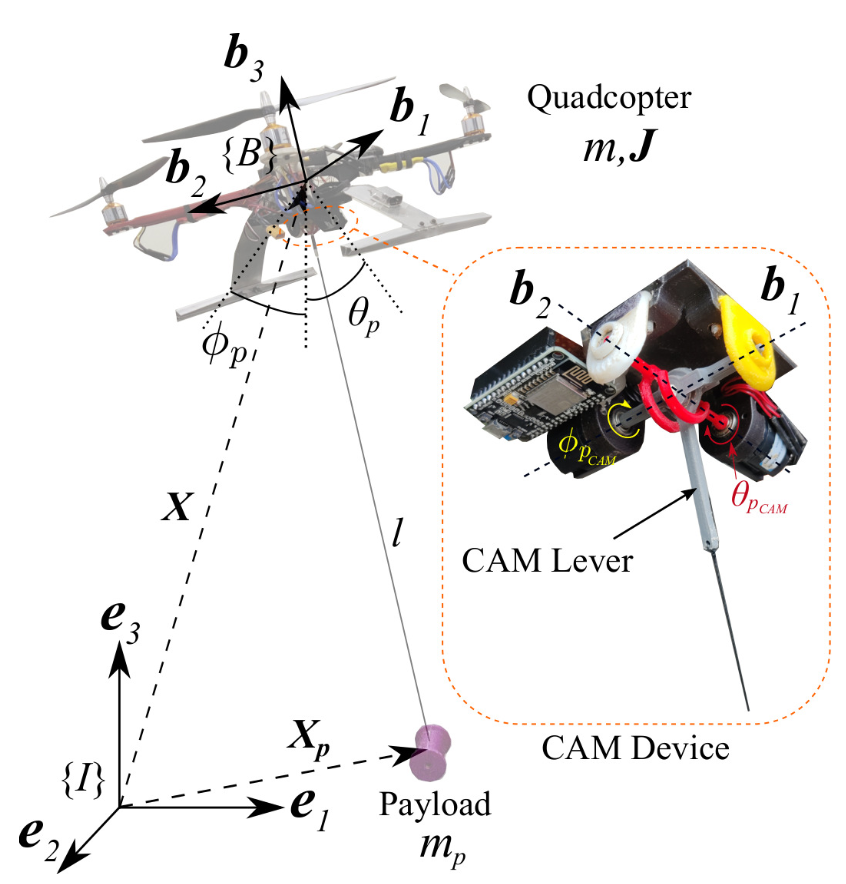
On-board cable attitude measurement and controller for outdoor aerial transportation